Dimple Bhuta
Principal Engineer – State Estimation and Control
Technology Innovation Hub for IoT and IoE (TIH-IoT), IIT-Bombay
Biography
I have a MSc in Biomedical engineering, BE in electronics engineering and over 9 years of research experience in the fields of robotics and computer vision. I am currently working as a Principal Engineer at TiH-IoT, IIT Bombay in the robotics group.
- Robotics
- Computer vision
- Bionics
-
Master of Science in Biomedical Engineering, GPA:3.828/4.000 (Top 12 % in class), 2012
Virginia Common Wealth University, USA
-
Bachelors of Engineering in Electronics, 2009
Mumbai University
Work experience
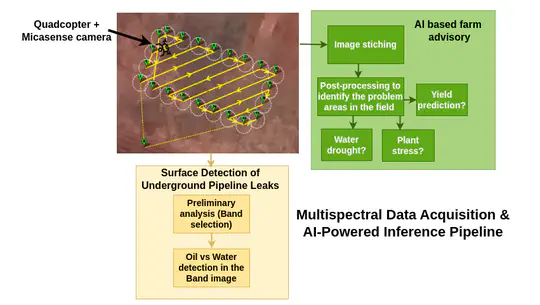
Multispectral Image Acquisition & Data Inference using UAV
Principal Engineer – State Estimation and Control at Technology Innovation Hub for IoT and IoE (TIH-IoT), IIT-Bombay
Currently leading two major initiatives - one focused on detecting underground pipeline leaks through advanced multispectral imaging, and another on drone-based onion crop phenotyping to power AI-driven farm advisory systems.
Lightweight Smart Sense-and-Avoid Module for Low-Altitude Agricultural UAVs
Principal Engineer – State Estimation and Control at Technology Innovation Hub for IoT and IoE (TIH-IoT), IIT-Bombay
Reactive, Plug-and-Play Sense-and-Avoid System for Pixhawk-Based UAVs in Precision Agriculture
Encoder-Orientation Sensor Fusion for Ground Robot Navigation
Senior Engineer – State Estimation and Control at Technology Innovation Hub for IoT and IoE (TIH-IoT), IIT-Bombay
Sensors-based mobile robot localization and obstacle avoidance.

Aerial Vehicle Localization Using a Downward-Facing Depth Camera for Precision Agriculture
Senior Engineer – State Estimation and Control at Technology Innovation Hub for IoT and IoE (TIH-IoT), IIT-Bombay
Implementation of localization algorithm for precision agriculture.
Path Planning and Patrolling for a team of Car-like Robots in a Campus Environment
Senior research fellow at ARMS Lab, IIT-Bombay
Developed reactive path planning and patrolling of a team of car like robots in campus like enviornment.

Programming robotic manipulator for pick and place task
Drone and Robotics Engineer at Dhristi works
Worked on implementation of motion planning algorithms for a manipulator with an intended application of beach cleaning.
Slip control experimental setup design
Research assistant at Singapore Institute of Neurotechnology, National University of Singapore
Designed slip control experimental setup with WidowX robot (under the guidance of a post-doctoral fellow), to emulate human reflexes in case of slip conditions.
Tactile and haptic glove interface
Research assistant at Singapore Institute of Neurotechnology, National University of Singapore
Developed a haptic glove and a graphical user interface, intending to render and replicate the sense of touch. Designed a first-generation interface between the tactile and the haptic glove to enable a user to feel the object gripped by the robot.
Development of motion planning algorithms for robots
Research assistant at Singapore Institute of Neurotechnology, National University of Singapore
Developed motion planning algorithms for the Universal Robots (UR10) to perform day-to-day tasks such as picking up the coin, bread cutting and opening the corkscrew for wine bottle.
Project Assistant at Multimodal Perception Laboratory, International Institute of Information Technology
Compared and Implemented algorithms for segmentation of jewelry in images.

Pattern recognition based prosthetic arm
Project Manager - Embedded Software Engineer at Infinite Biomedical Technologies
Conceptualized and engineered a pattern recognition based prosthetic arm which successfully classified subject’s hand positions using EMG signals. The aim of this project was to assist trans radial amputees to control their prosthesis.
Skills
Projects
Behavioral Cloning
Self-Driving Car Udacity Nanodegree Program
Successfully emulated human driving behavior autonomously in a simulated environment.

Face generation
Deep Learning Udacity Nanodegree Program
Implemented fake face generation using general adversarial networks (GANs).
Image captioning
Computer Vision Udacity Nanodegree Program
Generated captions for the image using deep learning.